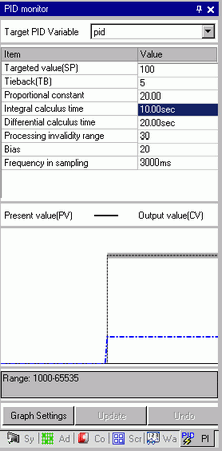
In Monitor Step, for PID instructions used on the Logic screen, you can check the operation of PID values. You can also change each parameter.
Target PID Variable
Select the PID variable that you want to monitor.
List of PID Adjustments
You can input values and adjust the PID while referring to the graph.
Graph Display
The PID instruction values are displayed in a graph that can be monitored.
Graph
You can specify the details of the graph. Click and the settings dialog box appears.

Displayed Items
Select the check box to display [Current Value], [Target Value], [Output Value], [Output Invalidity Range], or [Output Range].
Graph Display Range
Specify [Upper Limit], [Lower Limit] and [Width] for the graph display range.
Update Search/Sort
The graph must be updated with the values specified for the PID adjustment.
Undo
Return to the state before PID adjustment values were input.
PID Adjustments
Items |
Value |
Setpoint (SP) |
Specify the target value. Enter values for the minimum and maximum output. The range for input depends on the PID instruction output settings. For details, refer to the PID instructions. |
Tieback (TB) |
Specify a value for output during power off. The range for input depends on the PID instruction output settings. For details, refer to the PID instructions. |
Proportional Constant |
Specify the proportion for comparison control. A larger value means that the target value will be reached sooner. A smaller value means the set point will be approached more gradually, resulting in reduced overshooting. The setting range is from 0.01 to 100.00. For details about proportional constants, see the next page. |
Integral Calculus Time |
Specify the intervals between integral calculations. The setup range is from 0.00 to 3000.00 seconds. For details about integral calculus time, see the following. |
Differential Calculus Time |
Specify the intervals between differential calculations. The setup range is from 0.00 to 3000.00 seconds. For details about differential calculus time, see the following. |
Processing Deadband Range |
Specifies the range in which the PID operation does not run. The deviation in the settings range is "0", and the processing deadband range is based on +/- from the Set Point. The settings range is from 0 to (maximum output value -minimum output value) / 2. |
Bias |
The value specified here is added to the output value for operation. The settings range from the minimum output value to the maximum output value. |
Sampling Time |
Specify the sampling frequency for the PID operation. The frequency depends on the scan time and the PID instruction is operated in the scan after the specified frequency. The settings range is from operation frequency to 65535 (ms). |
Calculate the operation volume (output value) proportionate to the deviation (deviation between the set point and current value). The formula for the relation between deviation (E) and operation volume (CV) is as follows.
CV = KP x E
(KP is the proportional gain.)
When the deviation is fixed, the proportional action is as follows.
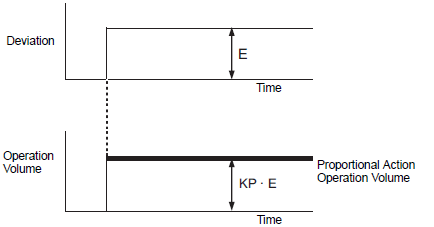
The operation volume changes within the range of 0 to 4095 (initial value). As KP increases, the operation volume proportionate to the deviation increases, and the correcting operation increases. This proportional action causes offset (residual deviation).
Continuously change the operation volume (output value) to eliminate any deviation (deviation between the set point and current value). Doing so can eliminate the offset from the proportional action.
Once deviation is caused in the integral action, the operation volume of the action changes to the operation volume of the proportional action. The time required for the change is called the "integral calculus time." The time is indicated as TI. A smaller TI results in a stronger integral action.
If the deviation is fixed, the integral action is as follows.
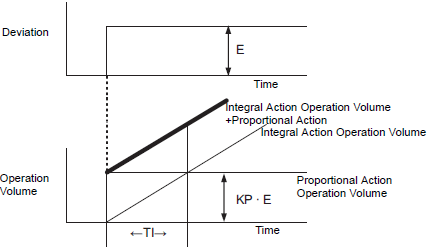
Use integral action as "PI action" combined with the proportional action or as "PID action" combined with the proportional and derivative action." You cannot use integral action alone.
Add the operation volume (output value) proportionate to any deviation (deviation between the set point and current value) to eliminate deviation. Doing so prevents the control target from drastically changing due to an external disturbance.
Once deviation has occurred in the derivative action, the operation volume of the action changes to the operation volume of the integral operation. The time required for the change is called the "differential calculus time" and is indicated as TD.
A larger TD results in stronger derivative action.
If the deviation is fixed, the derivative action is as follows.
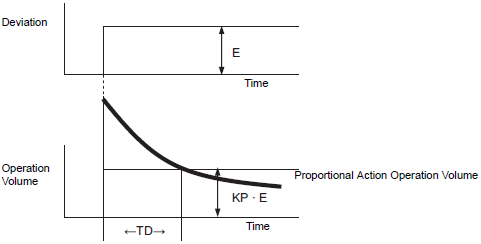
Use derivative action as "PD action" combined with the proportional action or as "PID action" combined with the proportional action and integral action. You cannot use derivative action alone.