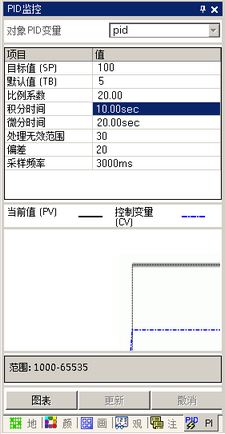
在监控步骤中,对于逻辑画面上使用的PID指令,可以查看PID值的运算。还可以更改每个参数。
对象PID变量
选择您想监控的PID变量。
PID调整表
可以参考该图表输入值和调整PID。
图表显示器
PID指令值显示在可被监控的图表中。
图表
可以指定图表的详情。点击图表,将弹出设置对话框。

显示的项目
勾选复选框,显示[当前值]、[目标值]、[输出值]、[输出无效范围]或[输出范围]。
图表显示器范围
指定图表显示器范围的[上限]、[下限]和[宽度]。
更新
必须用为PID调整指定的值更新图表。
撤消
返回到输入PID调整值之前的状态。
PID调整
|
项目 |
值 |
|
设定值(SP) |
指定目标值。输入最小和最大输出的值。输入范围取决于PID指令输出设置。更多信息,请参阅PID指令。 |
|
默认值 (TB) |
指定断电时的输出值。输入范围取决于PID指令输出设置。更多信息,请参阅PID指令。 |
|
比例系数 |
指定比较控制的比例。值越大意味着达到设定值的时间越短。值越小意味着接近目标值的速度越慢,从而减少超调。设置范围在0.01至100.00之间。有关比例系数的更多信息,请参阅下页。 |
|
积分时间 |
指定积分计算的间隔。设置范围在0.00至3000.00秒之间。有关积分时间的详细信息,请参阅以下内容。 |
|
微分时间 |
指定微分计算的间隔。设置范围在0.00至3000.00秒之间。有关微分时间的详细信息,请参阅以下内容。 |
|
处理无效范围 |
指定PID操作不运行的范围。设置范围的误差是“0”,处理无效范围以设定点的±为依据。设置范围从0到(最大输出值 - 最小输出值)/2。 |
|
偏差 |
会将这里指定的值加到输出值,用于PID运算。设置范围在最小输出值到最大输出值之间。 |
|
采样 频率 |
指定PID运算的采样频率。该频率取决于扫描时间,PID指令在指定频率后的扫描中运行。设置范围在运行频率至65535(毫秒)之间。 |
正比于误差(目标值和当前值之间的误差)计算运算量(输出值)。误差(E)和运算量(CV)之间关系公式如下。
CV = KP x E
(KP是比例增益)
当误差固定时,比例操作如下。
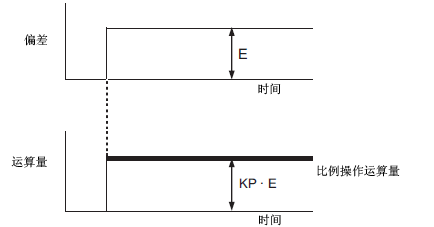
运算量在0至4095(初始值)的范围内变化。随着KP的增加,与偏差成比例的运算量也增加,纠正操作也加强。这一比例操作会造成偏移(剩余偏差)。
连续改变运算量(输出值)来消除偏差(目标值和当前值之间的偏差)。这样可以消除比例操作的偏移。
一旦积分操作造成偏差,纠正动作的运算量就更改为比例操作的运算量。更改所需的时间被称为“积分时间”。该时间用TI表示。TI越小,积分操作就越强。
如果偏差固定,积分操作如下。
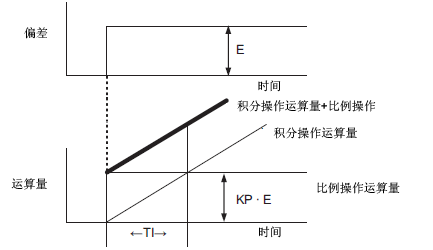
积分操作与比例操作联合使用时称为“PI操作”,与比例操作和微分操作联合使用时称为“PID操作”。不能单独使用积分操作。
正比于偏差(目标值和当前值之间的偏差)增加运算量(输出值),以消除偏差。这样做可以防止控制目标由于外部干扰而剧烈变动。
一旦微分操作产生了偏差,该操作的运算量就更改为积分操作的运算量。更改所需的时间被称为“微分时间”,并用TD表示。
TD值越大,微分作用就越强。
如果偏差固定,微分操作如下。
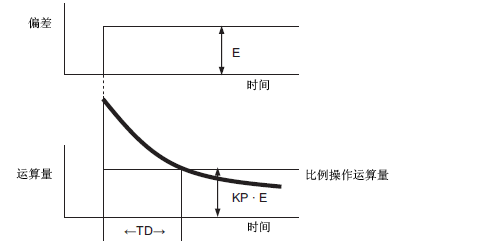
微分操作与比例操作联合使用时称为“PD操作”,与比例操作和积分操作联合使用时称为“PID操作”。不能单独使用微分操作。