
PID指令处理完成标志(变量名.Q)
当处理完成后将值输出到操作数D1时,.Q置ON。当正在执行1个扫描时PID指令的完成标志置ON。
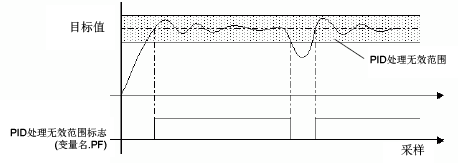
处理无效范围标志(变量名.PF)
当当前值达到通过指定PID变量(处理无效范围变量名.PF)指定的范围内的目标值时,该标志置ON,当当前值超出该范围时,该标志置OFF。
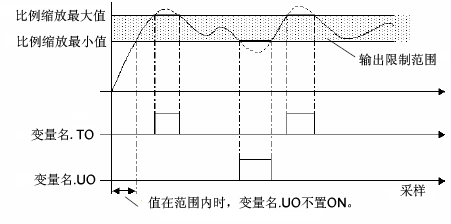
输出值超出上限/下限(变量名.TO、变量名.UO)
双击PID指令,显示指定PID变量输出范围的对话框。如果计算结果超出指定的输出值,变量名.TO置ON。如果结果小于指定下限,变量名.UO置ON。PID继续,即便状态位置ON,计算的值作为指定上限或下限输出。
积分设置 ( 变量名 .IF)
双击PID指令,显示对话框,设置执行PID指令的范围。如果结果超出指定的积分设置,.IF置ON。每个状态的积分设置只在范围内执行积分计算。
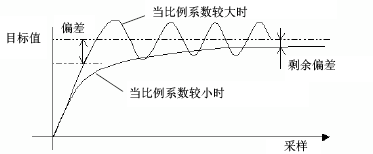
比例系数(变量名.KP)
指定一个比例系数(变量名.KP),对应于目标值与当前值之间的偏差输出一个值。
较小的比例系数会产生较小的输出值以达到目标值,能消除超调但可能会增加剩余偏差。较大的比例系数会产生较大的输出值以达到目标值,能够减少达到目标值的时间,但可能会导致振荡。
设置范围:0.01 至 1000.00
内部数据是整型变量。不能使用小数。
要设置0.01,请使用0.01 x 1000 =10。
将变量名 .KP指定为乘以1000 的值。 当比例系数设为0.00时,输出是0。

在比例控制中,如果当前值小于目标值,运算量将为100%。如果目标值与当前值相等(无偏差),运算量将是0%。

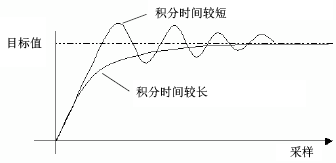
积分时间(变量名.TR)
通过设置积分时间(.TR),可以消除与目标值的偏差。
当运算量接近目标值时,偏差也变得很小,以致于运算量不能获得足够的值来抵消偏差。微小的偏差被称为剩余偏差。可通过积分控制来消除偏差。当偏差累积达到一定程度时,积分控制通过增加运算量来调节偏差。当积分时间变短时,达到目标值的运算量就变大,从而造成超调和振荡并在较短的时间内达到目标值。同样,随着积分时间变长,达到目标值的运算量变小,从而减少了超调和振荡,但达到目标值的时间变长。
积分时间指定了执行积分处理的间隔时间(以秒为单位)。
设置范围:0.01 至3000.00 (S)之间
内部数据是整型变量。不能使用小数。
要设置0.1 x 1000 =100.,请使用0.1 x 1000 =100。
将变量名 .TR 指定为乘以1000的值。当积分时间设为0时,不能执行该进程。
微分时间(变量名.TD)
通过设置微分时间(.TD),可以快速响应任何变化。
比例控制和积分控制需要一定的时间(时间常量),不能立即响应外部干扰。返回原始目标值需要一定的时间。如果与外部干扰相比,当前值和先前值之间的偏差较大时,微分控制可立即响应并分配较大运算量。当微分时间较长时,从外部干扰的影响中恢复所需的时间就较短,但会导致超调和频繁的振荡。当微分时间较短时,则能够减小超调和振荡,但从外部干扰的影响中恢复就需要较长的时间。

设置范围:0.01 至3000.00 (S)之间
内部数据是整型变量。不能使用小数。
要设置0.1 x 1000 =100.,请使用0.1 x 1000 =100。
为变量名 .TD指定乘以1000的值。当微分时间设为0.00时,不能执行该进程。
处理无效范围(变量名.PA)
在“处理无效范围”中,不进行PID控制,输出最小值以实现无振荡的平稳控制。

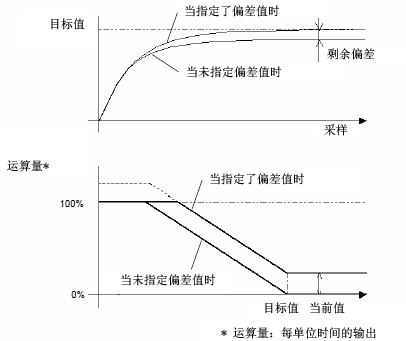
偏差(变量名.BA)
设置偏差值(偏移)。这可以减少比例控制导致的任何剩余偏差。
采样频率(变量名.ST)
这消除了从控制设置频率中获得的S2值的噪声。移动平均值根据上一次过滤结果和新得到的数据进行计算。若当前数据包含意外值时,指定采样频率可将对输出值的影响降至最小。这是因为计算时使用了以前测量的数据及当前数据的平均值。请为采样频率指定一个比控制设置频率更大的值。若要禁用过滤器,请将采样频率指定为0。