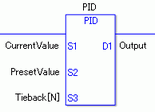
下面描述了PID指令操作数S1、S2、S3和D1的可指定内容。PID指令的实际步数取决于操作数的指定方法。下面描述如何计算步数。
HP操作数的步数+操作数S1的步数 + 操作数S2的步数 + 操作数S3的步数
+ 操作数D1的步数 + 5 = 一个指令的总步数
例如,计算PID指令的步数
(有关操作数步数的信息,请参阅下面的操作数设置。)
{PID控制 = 1步(HP操作数中的PID变量固定为1步)}
+ {Current value = 1步} + {Preset = 1步} + {Tieback value[N] = 3步} + {Output = 1步} + {5步} = 12步。指令还包括最后 5 个步骤。必须加上这5步。