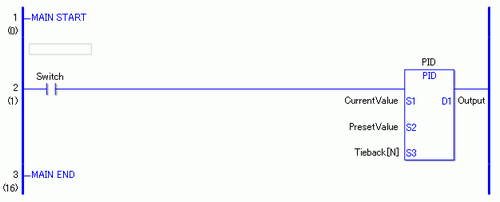
当启用PID指令时,将计算PID并调节和输出(计算)运算量。 当如下所示禁用指令时,PID输出默认值。默认值是在S3中指定的。如果禁用指令后没有必要输出,则输入常量0。
要在逻辑程序中使用PID指令,首先将变量分配给PID变量操作数(HP)和整型变量操作数(S1, S2, S3 和D1) 。
PID变量
当为PID指令操作数HP分配变量时,会自动为该变量分配一个成员。
|
PID变量 |
变量设置 |
描述 |
|---|---|---|
|
变量名.Q |
位变量 |
PID指令处理完成标志 |
|
变量名.PF |
位变量 |
处理无效范围标志 |
|
变量名.UO |
位变量 |
输出值超出下限 |
|
变量名.TO |
位变量 |
输出值超出上限 |
|
变量名.IF |
位变量 |
积分设置 |
|
变量名.KP |
整型变量 |
比例系数 |
|
变量名.TR |
整型变量 |
积分时间 |
|
变量名.TD |
整型变量 |
微分时间 |
|
变量名.PA |
整型变量 |
处理无效范围 |
|
变量名.BA |
整型变量 |
偏差(偏移) |
|
变量名.ST |
整型变量 |
采样频率 |
分配给比例系数、积分时间和微分时间的值,在“PID监控”中输入的值和在程序中输入各PID变量时的值看起来是不同的。当在程序中输入值时,用1000乘以比例系数、积分时间和微分时间。
例如,比例系数 0.1 x 1000 -> 100

所有PID变量都是保持型变量。每个工程最多允许有8个PID指令。
可为1个PID变量指定一个PID指令。