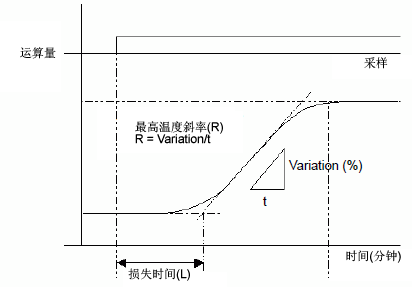
下面以温度控制为例进行说明。要优化PID控制的结果,需要优化P(比例元素)、I(整型元素)和D(微分元素)的常数值。可以使用阶跃响应法来获取不同设定值的PID温度常数。需要注意的是,根据使用和设定值的情况,可能不对该值进行优化。在这种情况下,执行在线监控并调整PID监视器窗口中的值。为阶跃响应法指定设定值并将100%的运算量输出到控制目标等级上。这时,测量下面显示的温度曲线的最高温度斜率(R)和损失时间(L)。
在下面的公式中为最高温度斜率(R)和损失时间(L)插入测量值,以计算比例系数、积分时间和微分时间常数。将计算值分配到PID监控窗口中。
“比例系数” = 100/(0.83 .R .L) [%]
“积分时间” = 1/(2 .L) [事件数/分钟](公式 = 未确认)
“微分时间”= 0.5 .L [分钟]